
| 详细信息 |
什么是具身智能? |
| 编辑: 来源:中国平安证券 时间:2023/7/27 |
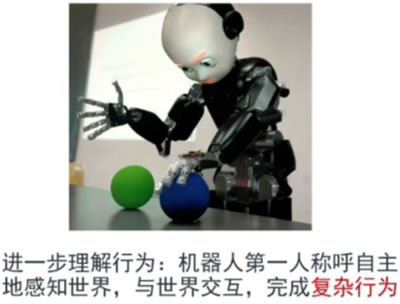
根据证券时报报道,英伟达创始人黄仁勋在 ITF World 2023 半导体大会上表示,AI 下一个 浪潮将是“具身智能”,其描述的“具身智能”是指能够理解、推理并与物理世界互动的智能系统, 包括机器人技术、自动驾驶汽车,甚至是聊天机器人,它们会更聪明,因为它们能了解物理世界 根据上海交大教授卢策吾在机器之心 AI 科技年会上,发表了主题演讲 ――《具身智能》, 具身智能是智能科学的一个基础问题,是指具有身体体验的智能。从认知角度看,人类是D一人称 视角的智能,但给机器喂很多数据进行学习,属于第三人称的智能,比如给机器很多盒子,并且标 注这就是盒子,然后机器就会知道这种模式是盒子,但机器并不是通过体验知道这是盒子的。 根据《具身智能》,主动猫是具身智能,旁观猫是旁观智能。1963 年的一个实验能一定程 度展示两者的区别,一只猫被绑起来,只能看这个世界,与其连接的另一只猫则可以主动去走。被 动的猫是一种旁观的智能,而主动的猫是具身的智能,实验的后,主动体验的猫学会了正常行走, 但旁观的猫并没能获得行走能力。
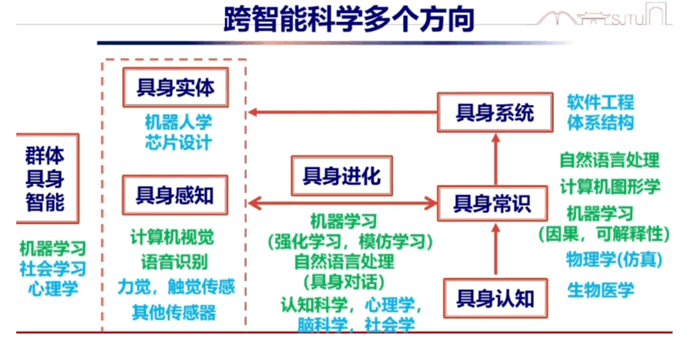
具身智能涉及多学科,是系统性工程。上海交通大学卢策吾教授在机器之心 AI 科技年会上 发表主题演讲《具身智能》提到 1950 年图灵在他的论文《Computing Machinery and Intelligence》 中次提出了具身智能的概念,概念提出了几十年了直到近几年才比较热门,原因是它涉及到众多 的学科,当时很多学科都不是很成熟。硬件、软件还有各种触觉传感器也不够成熟。而到了今天, 各个学科都可以聚到一起来做这么一个宏大的系统。在这样的情况下,我们才有可能推动这个方向 进一步发展
根据《具身智能》,具身智能包括 3 个模块:具身感知、具身想象和具身执行,AI+机器人 正是“具身智能”当前的落点。工业机器人主要根据控制系统发出的指令信号控制机器人主体完成 任务,主要依赖于机器人的执行层。与工业机器人不同,具身智能机器人若能像人一样与环境交互、 感知、决策、完成任务,将不得不提升感知层和认知层的能力。卢策吾教授提出 PIE 方案,认为具 身智能包括 3 个模块:具身感知(Perception)、具身想象(Imagination)和具身执行(Execution), 有望加速推动具身智能落地。目前看来,AI+机器人或许正是“具身智能”当前的落点
|
| 【声明:转载此文出于传递更多信息之目的,并不意味着赞同其观点或证实其描述,文章内容仅供参考,如有侵权,请联系删除。】 |
| 推荐信息 |
|
为什么机器人要设计成类人形
人形是最适合人类社会所有场景的形态,无需改变场景来适应机器;人形的好感度上限远高于非人形;人形的肢体语言最符合人类认知
为什么要发展人形机器人
中国制造业劳动力总量下降,且年轻劳动力占比快速下降,人力成本持续上升,机器替代人是一大趋势,中国是全球最大的机器人市场
谐波减速器和RV减速器比较
谐波减速器体积小,质量小,在多关节机器人小臂,腕部,手部等部件具有较强优势;RV减速器负载能力和刚度高,耐疲劳性能好,常用于机器人机身的腰,上臂,下臂等
机器人配件减速器相关企业
哈默纳科从事谐波减速器,机电一体化产品;日本新宝从事精密减速机,变速机的开发;绿的谐波实现了精密谐波减速器的规模化生产及销售
机器人的外部传感器有哪些
迎宾服务机器人外部传感器用来检测机器人所处环境,用于使机器人更准确地获取周围环境情况,与实现特定功能相关的传感器包括气体识别传感器,局放传感器等
机器人的内部传感器有哪些
机器人部传感器用来检测机器人本身状态(如手臂间角度)的传感器,为控制系统提供反馈信息,包括位移传感器、速度/角速度传感器,加速度传感器
服务机器人应用场景高度细分,通用化或为盈利重要突破方向
将走向硬件标准化+软件通用化,实现场景初步整合,零部件标准化:相似功能的机器人使用相同零部件,最大化单一零部件产量,降低成本
提高MEMS IMU精度有两种途径
采用新材料,新工艺,新技术和新方法;采用软件算法修正来提高微型惯性传感器的精度,误差模型可以分为静态误差模型,动态误差模型和随机误差模型 |
| 智能运输机器人 |
| AGV无人运输机器人-料箱版 |
| AGV无人运输机器人-标准版 |
| AGV无人运输机器人-料箱版(钣金材质) |
| AGV无人运输机器人-货架版(钣金材质) |
| AGV无人运输机器人-货架版(亮面不锈钢材质) |
| AGV无人运输机器人-开放版 |
| 行业动态 |
