
| 详细信息 |
机器人的内部传感器有哪些 |
| 编辑: 来源:中国平安证券 时间:2023/7/27 |
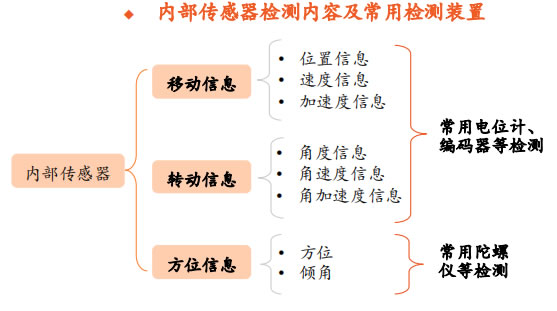
智能机器人传感器根据检测对象的不同可分为内部传感器和外部传感器。内部传感器和外部传感器共同组成了机器人的感知 系统,用于获取机器人内部和外部环境的信息,并把这些信息反馈给控制系统。 内部传感器:用来检测机器人本身状态(如手臂间角度)的传感器,为控制系统提供反馈信息。机器人常用的内部 传感器包括位移传感器、速度/角速度传感器、加速度传感器以及多维力传感器,具体有编码器、陀螺仪等。
|
| 【声明:转载此文出于传递更多信息之目的,并不意味着赞同其观点或证实其描述,文章内容仅供参考,如有侵权,请联系删除。】 |
| 推荐信息 |
|
服务机器人应用场景高度细分,通用化或为盈利重要突破方向
将走向硬件标准化+软件通用化,实现场景初步整合,零部件标准化:相似功能的机器人使用相同零部件,最大化单一零部件产量,降低成本
提高MEMS IMU精度有两种途径
采用新材料,新工艺,新技术和新方法;采用软件算法修正来提高微型惯性传感器的精度,误差模型可以分为静态误差模型,动态误差模型和随机误差模型
MEMS IMU 误差类型
MEMS惯性传感器零偏参数误差主要包含零偏,零偏稳定性与重复性导致的误差;刻度因数的误差将直接带来测量的系统偏差
惯性传感器中存在系统误差和随机误差
所谓系统误差是指非随机误差,是比例因子非线性误差;随机误差一般指噪声,主要包含随机行走误差和零偏不稳定性误差
人形智能机器人借助IMU实现定位、平衡及姿态检测
惯性传感器采集的角速度与加速度等惯性信息可以用于推算人形机器人的实时位置与运动轨迹,与机器人搭载的多传感器融合,在数据类型和数据频率间实现互补
惯性导航在人形机器人领域的应用
GNSS 在卫星信号较弱的场景下会导致定位信息延迟而造成不可预知的失控场景;惯性导航系统数据更新率高,导航信息延迟低,不易受到外界干扰
机器人视觉不同方案优缺点对比
ToF视觉方案对光信号的稳定性要求相对宽松;双目视觉方案近距离精度为毫米级,2m 内误差在千分之五;结构光视觉方案可以做到相对较高的分辨率
智能机器人视觉解决方案-3D传感器
结构光法,通过投影特定的光模式到物体上, 并通过检测反射光的变形来获取物体的三维形状;ToF法:通过测量光线从发射到反射回来的时间来估计物体的距离 |
| 智能运输机器人 |
| AGV无人运输机器人-料箱版 |
| AGV无人运输机器人-标准版 |
| AGV无人运输机器人-料箱版(钣金材质) |
| AGV无人运输机器人-货架版(钣金材质) |
| AGV无人运输机器人-货架版(亮面不锈钢材质) |
| AGV无人运输机器人-开放版 |
| 行业动态 |
