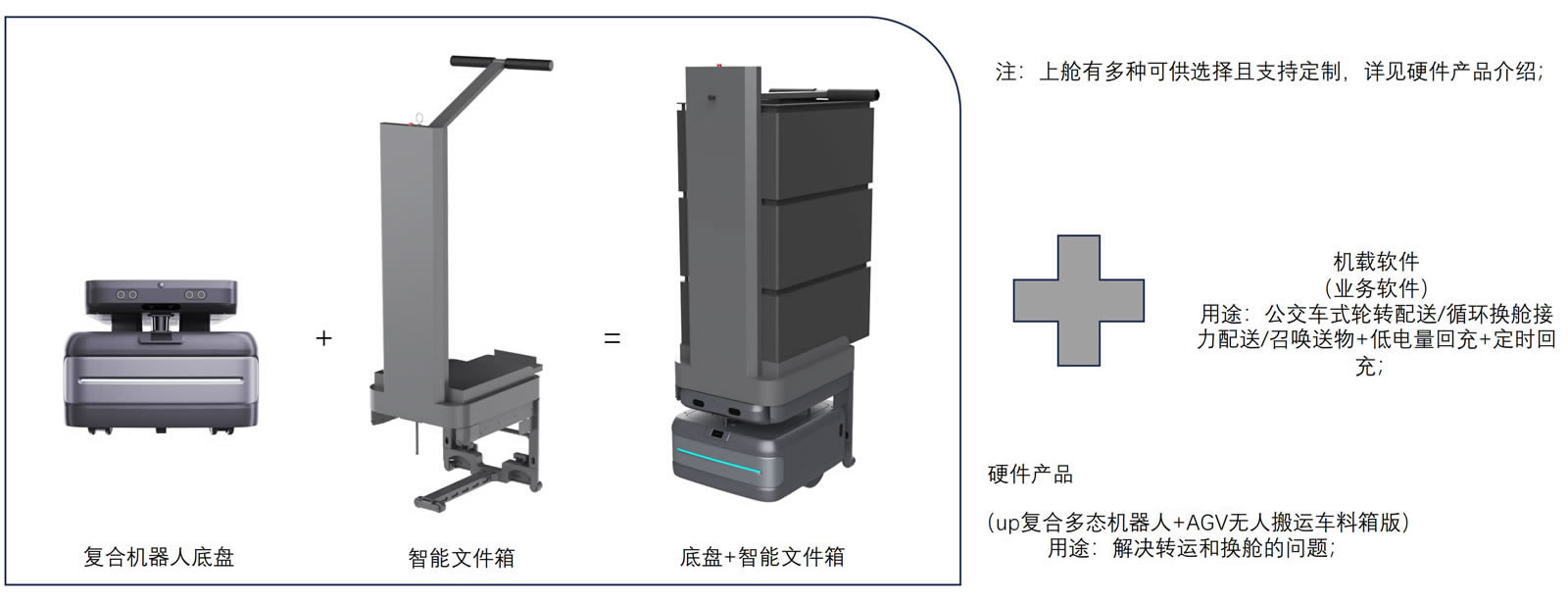
一、解决方案 |
二、配送模式 |
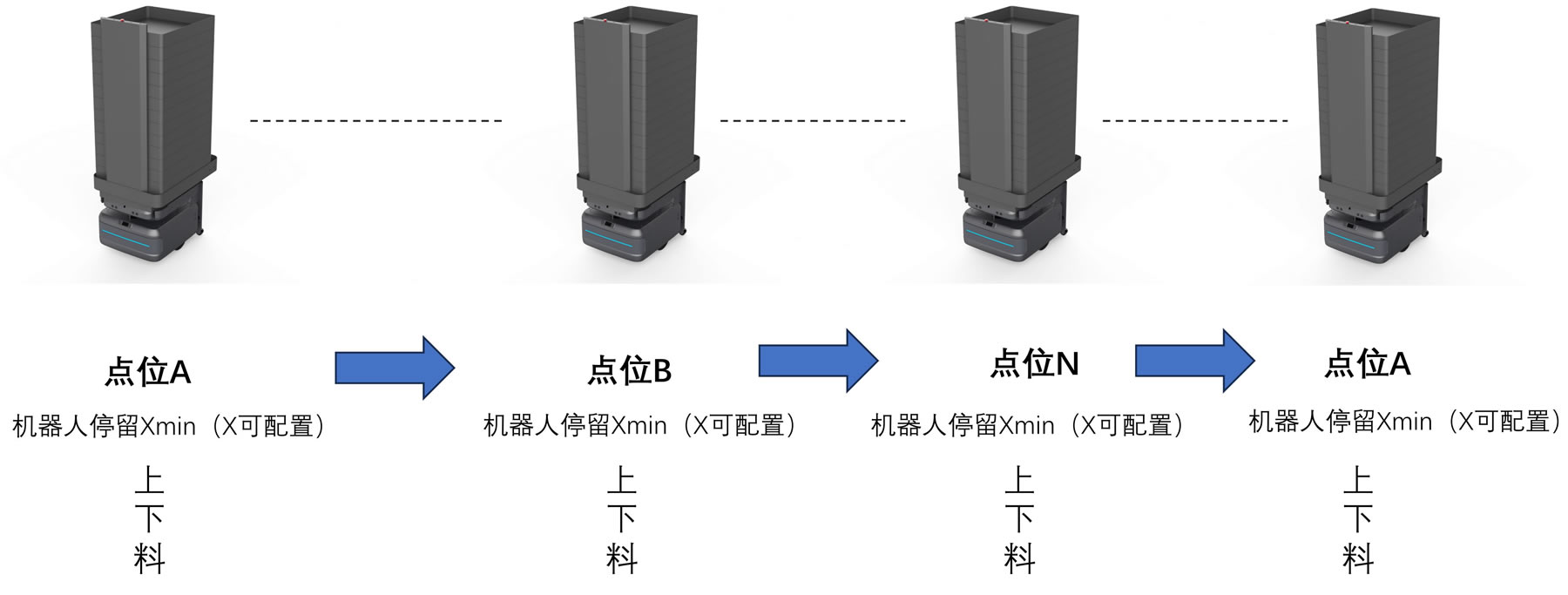
2.1、公交车式自动轮转模式 |
2.2、循环接力送模式 |
|
流程简述:机器人在A点与1号上舱保持组合状态停留X分钟后,由A点前往B点,抵达B点后将1号舱落至1号舱位并移动至2号舱位与2号舱自动接
驳完成组合后由B点返回A点,抵达A点在A点停留X分钟后循环该流程,过程中电量低于配置及到达指定充电时间会自主前往充电桩充电;
货架配置:2台(AGV无人搬运车料箱版或其他型号); 机器人配置:1台; 物理按钮配置:0个; |

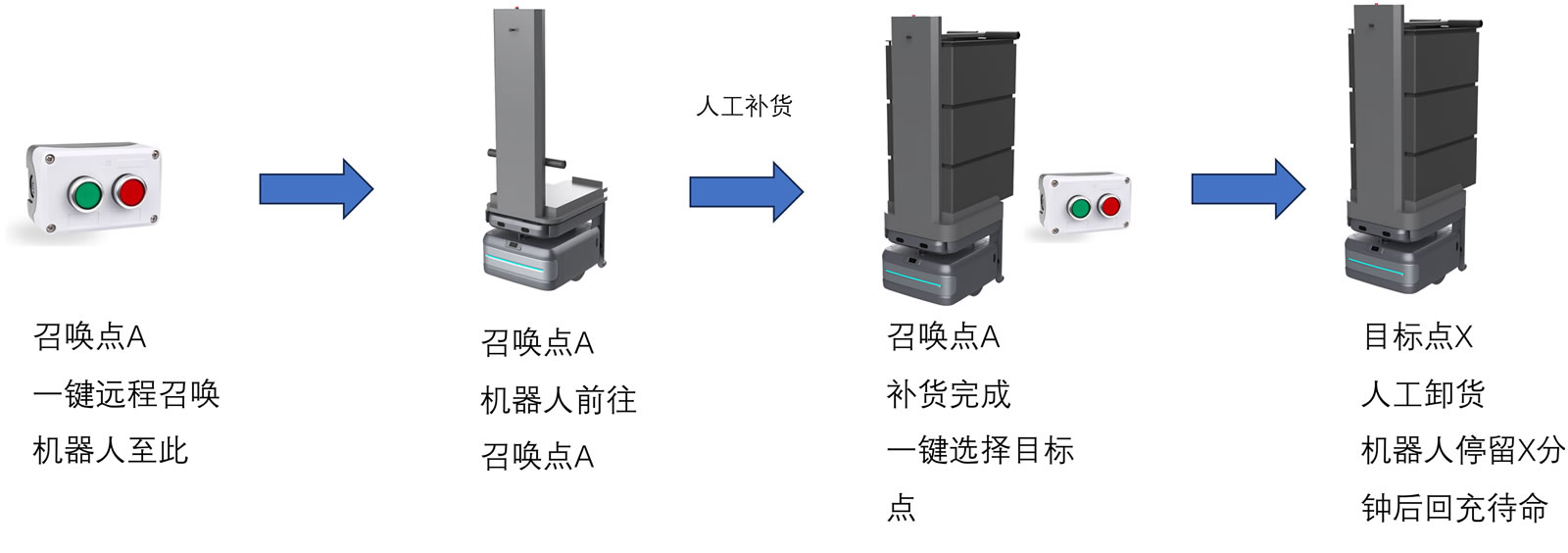
2.3、召唤送物模式 |
|
流程简述:按钮一键召唤机器人前往召唤点,按键选择需要机器人配送的目标点,机器人完成配送任务后自主返回充电桩;
货架配置:1台(AGV无人搬运车料箱版或其他型号); 机器人配置:1台; 物理按钮配置:1-2个(需充电); |
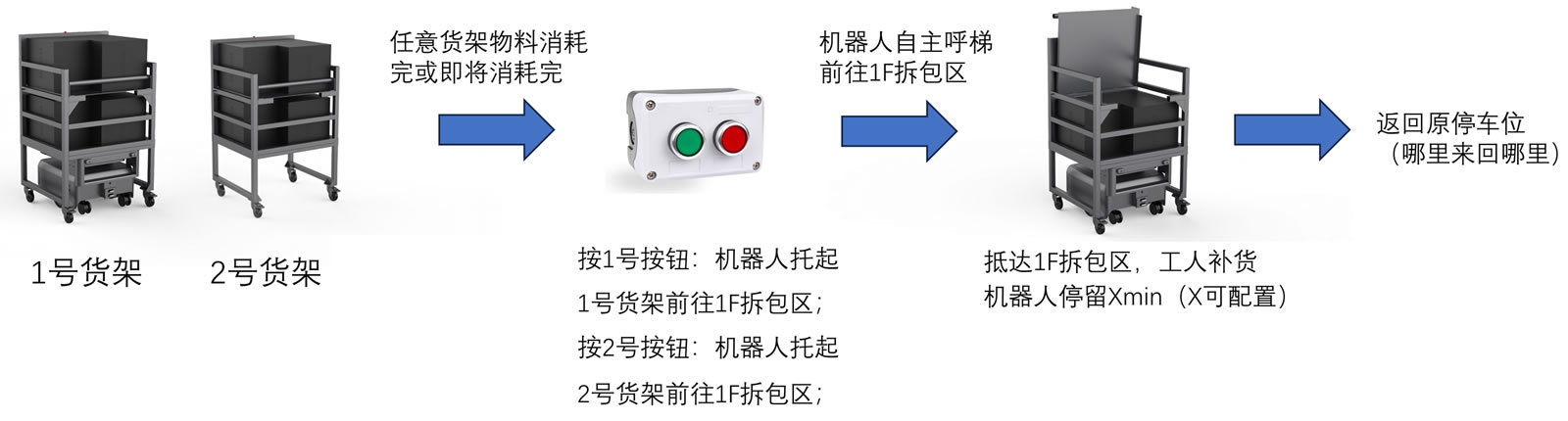
2.4、按需补料模式 |
|
流程简述:站点员工通过物理按钮,一键触发机器人前往1F拆包区补货,停留指定时间后自主乘梯前往SN左基座或SN右基座;
站点名称:SN左基座(举例); 货架配置:2个(满载存放80个物料); 机器人配置:1台; 任务发起按钮配置:1个(需供电); |