
| 详细信息 |
智能机器人视觉解决方案-3D传感器 |
| 编辑: 来源:民生证券 时间:2023/7/20 |
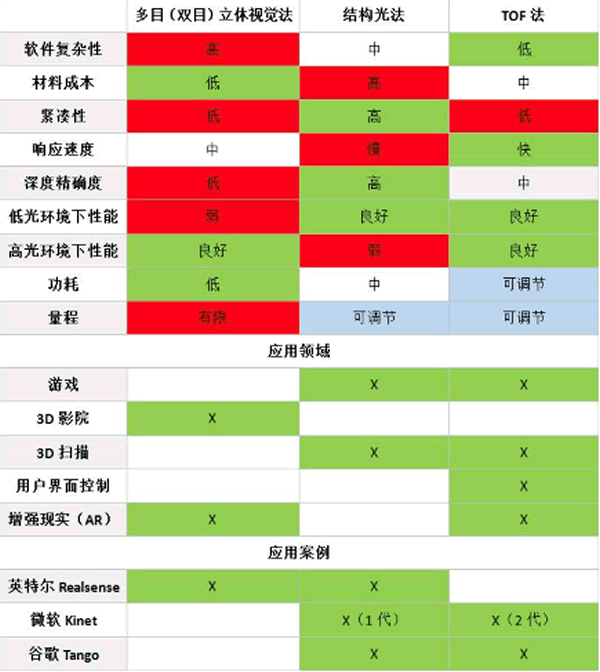
目前市场上的3D视觉采用的应用方案原理主要有三种:结构光法、ToF法和多目(双目)立体视觉法。结构光法:通过投影特定的光模式到物体上, 并通过检测反射光的变形来获取物体的三维形状。ToF法(Time-of-Flight):通过测量光线从发射到反射回来的时间来估计物体的距离。多目(双 目)立体视觉法:模仿人眼,通过测量两个相机视角之间的视差来计算物体的深度。 3D视觉应用方案L域三大原理的提供商分别有:多目(双目)立体视觉法提供商:国外(英特尔、微软,Leapmotion);国内(图漾科技、纵目 科技、凌云光技术、西纬科技和弼智仿生)。结构光法提供商:国外(英特尔,谷歌);国内(图漾科技、奥比中光和华捷艾米)。 飞行时间法提供商:国外(微软、谷歌、英飞凌、德州仪器、意法半导体),国内(海康威视、舜宇光学和乐行天下)。
|
| 【声明:转载此文出于传递更多信息之目的,并不意味着赞同其观点或证实其描述,文章内容仅供参考,如有侵权,请联系删除。】 |
| 推荐信息 |
|
机器人配件行星滚柱丝杠生产企业
汉江机床完成滚柱直线导轨副等15项丝杠产业新产品开发;鼎智科技在微型行星滚柱丝杠的研发与生产上已有里程碑式达成
人形智能机器人传感器与执行器类型拆解
手部结构采用和人体相同的五指多关节设计,执行器为螺杆旋转带动齿轮旋转进而使手指关节旋转的结构,使用较为经典的六电机驱动方式,拇指采用双电机驱动弯曲和侧摆
人形机器人潜在市场规模千亿级别,增速迅猛
全球人形机器人市场估计为5.6亿美元,而到2027年预计市场 规模将达到141亿美元,CAGR达58.5%,2027年中国人形机器人市场有望达到23亿美元,CAGR达56.4%
国产人形机器人-傅利叶ExoMotus
傅利叶智能在康复机器人领域的产品矩阵已经基本成型,自主研发的ArmMotus™ EMU三维上肢康复机器人、ExoMotus ™下肢康复机器人
国产人形机器人-优必选 WalkerX
Walker X身高130cm,体重63kg,具有41个高性能伺服驱动关节,最高时速为3km/h ,面部160°环绕4.6K高清双柔性曲面屏,配备便捷可拆卸电池
国产人形机器人-小米CyberOne
人形仿生机器人CyberOne,高1.77米,重52kg,内部名称铁大,配备Mi-Sense深度视觉模块,搭配AI算具备感知3D空间并识别个体,手势和表情的能力;凭借自主研发的MiAI环境语义识别引擎和MiAI语音情感识别引擎
智能人形机器人-ROMEO
机器人ROMEO有39台来自瑞士的直流电机,使用了不同规格的RE-max 系列款型以及五台DCX电机,所有驱动器均为有刷电机
智能人形机器人-POPPY
机器人POPPY,利用5个伺服电机构建了机器人的脊柱,使用弹簧连接下肢上部和下部关节, 配备了一款鞋子,鞋子上放置5个压力传感器 |
| 智能运输机器人 |
| AGV无人运输机器人-料箱版 |
| AGV无人运输机器人-标准版 |
| AGV无人运输机器人-料箱版(钣金材质) |
| AGV无人运输机器人-货架版(钣金材质) |
| AGV无人运输机器人-货架版(亮面不锈钢材质) |
| AGV无人运输机器人-开放版 |
| 行业动态 |
