
| 详细信息 |
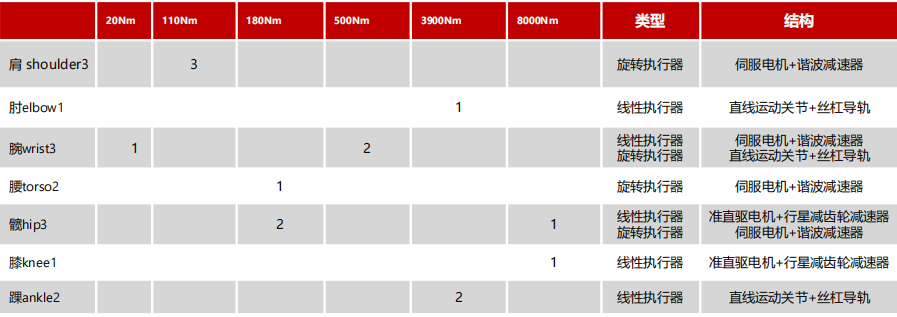
人形智能机器人传感器与执行器类型拆解 |
| 编辑: 来源:民生证券 时间:2023/7/20 |
Optimus 人形机器人工程机在会场展示行走能力,并在播放视频中完成提起水壶行走浇花,工厂内搬运物品等动作,这些动作都是通过Optimus 自身集成的软硬件执行完成,没有外部控制与外接线束,说明样机已具备一定程度的运动规划与任务执行能力。 执行器总成结构:旋转执行器采用谐波减速器内部具有离合器,采用永磁力矩电机驱动;直线执行器采用内部旋转螺杆结构。 手部结构:手部结构采用和人体相同的五指多关节设计,执行器为螺杆旋转带动齿轮旋转进而使手指关节旋转的结构。手部参数:6 执行器,11 自由度,可提起 20 磅(9kg)重的包,使用较为经典的六电机驱动方式,拇指采用双电机驱动弯曲和侧摆,其它四指各用一个电机带动。 擎天柱腿部的线性执行器主要分布负责支撑和承力的髋关节、膝关节及踝关节,具有前后摆动自由度。 视觉系统:已与 FSD算法打通,机器人在行走时可实现环境感知与记忆。
|
| 【声明:转载此文出于传递更多信息之目的,并不意味着赞同其观点或证实其描述,文章内容仅供参考,如有侵权,请联系删除。】 |
| 推荐信息 |
|
人形机器人潜在市场规模千亿级别,增速迅猛
全球人形机器人市场估计为5.6亿美元,而到2027年预计市场 规模将达到141亿美元,CAGR达58.5%,2027年中国人形机器人市场有望达到23亿美元,CAGR达56.4%
国产人形机器人-傅利叶ExoMotus
傅利叶智能在康复机器人领域的产品矩阵已经基本成型,自主研发的ArmMotus™ EMU三维上肢康复机器人、ExoMotus ™下肢康复机器人
国产人形机器人-优必选 WalkerX
Walker X身高130cm,体重63kg,具有41个高性能伺服驱动关节,最高时速为3km/h ,面部160°环绕4.6K高清双柔性曲面屏,配备便捷可拆卸电池
国产人形机器人-小米CyberOne
人形仿生机器人CyberOne,高1.77米,重52kg,内部名称铁大,配备Mi-Sense深度视觉模块,搭配AI算具备感知3D空间并识别个体,手势和表情的能力;凭借自主研发的MiAI环境语义识别引擎和MiAI语音情感识别引擎
智能人形机器人-ROMEO
机器人ROMEO有39台来自瑞士的直流电机,使用了不同规格的RE-max 系列款型以及五台DCX电机,所有驱动器均为有刷电机
智能人形机器人-POPPY
机器人POPPY,利用5个伺服电机构建了机器人的脊柱,使用弹簧连接下肢上部和下部关节, 配备了一款鞋子,鞋子上放置5个压力传感器
智能人形机器人-欧洲ICUB
智能人形机器人ICUB外形像一个不到5岁的孩子,是世界上为数不多的具有灵敏的全身电子皮肤系统以提供触觉的机器人之一
特斯拉Tesla Bot加速人形机器人赛道争夺战
特斯拉智能机器人不仅会模仿人类动作,还可以完成物品分 类,抓力控制等更复杂的任务,基于视觉神经网络神经系统预测能力的自动驾驶技术,处理能力为每秒 1024 亿次 |
| 智能运输机器人 |
| AGV无人运输机器人-料箱版 |
| AGV无人运输机器人-标准版 |
| AGV无人运输机器人-料箱版(钣金材质) |
| AGV无人运输机器人-货架版(钣金材质) |
| AGV无人运输机器人-货架版(亮面不锈钢材质) |
| AGV无人运输机器人-开放版 |
| 行业动态 |
