
| 详细信息 |
惯性导航在人形机器人领域的应用 |
| 编辑: 来源:民生证券 时间:2023/7/24 |
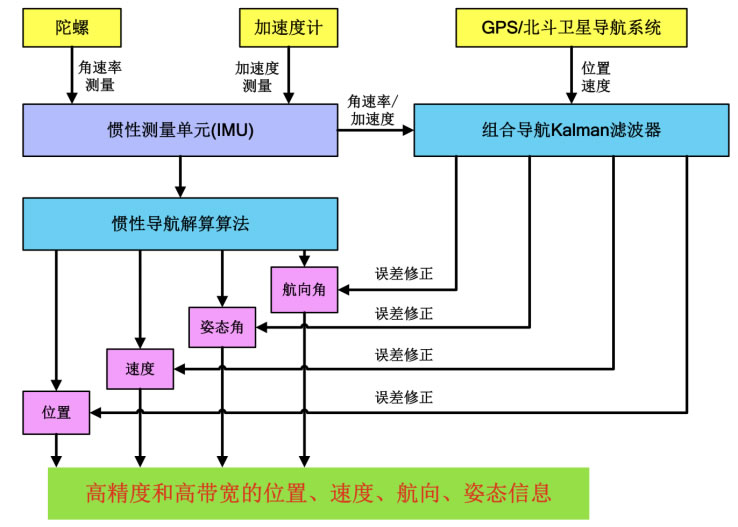
惯性导航是惯性技术重要应用之一,惯性导航系统(Inertial Navigation System - INS)是以陀螺仪和加速度计为敏感器件并融合卫星导航、卫星导航、 天文导航、无线电导航等其他导航技术而形成的导航参数解算系统。 目前 ADAS 系统一般运用速度计、陀螺仪、压力传感器和磁力仪等惯性传感 器。加速度计用来测量运动物体的加速度大小和方向,获取位移信息;陀螺仪形 成导航坐标系,使加速度计测量值投影到该坐标系中,可输出航向和姿态角;磁 力仪用来测量测量磁场强度和方向,定位方向,通过地磁向量得到误差表征量, 可反馈到陀螺仪的姿态解算中,用以校准陀螺仪的漂移。 GNSS+IMU 方案是常用的惯性导航系统设计方案,二者形成互补。 GNSS 在卫星信号较弱的场景下会导致定位信息延迟而造成不可预知的失控场景; 惯性导航系统数据更新率G,导航信息延迟低,而且系统稳定不易受到外界干扰, 可以不依托外在信息,无惧J端环境和弱信号影响,能够解决持续性问题,但长 期时间运作会导致系统累计误差增加,因此需要 GNSS 解决准确性问题,对位置 信息进行校准。其算法示意图如下:
G精度惯性传感是 L2.5 以上自动驾驶刚需,多传感器融合方案正在演进中。 目前,依靠单一定位技术无法满足自动驾驶汽车所需要的G精度。从现有乘用车和商用车主机厂使用的方案看,基本使用多传感器融合定位技术,除了采用组合 导航和G精度地图,还会选择视觉 SLAM 激光雷达等技术。
|
| 【声明:转载此文出于传递更多信息之目的,并不意味着赞同其观点或证实其描述,文章内容仅供参考,如有侵权,请联系删除。】 |
| 推荐信息 |
|
机器人视觉不同方案优缺点对比
ToF视觉方案对光信号的稳定性要求相对宽松;双目视觉方案近距离精度为毫米级,2m 内误差在千分之五;结构光视觉方案可以做到相对较高的分辨率
智能机器人视觉解决方案-3D传感器
结构光法,通过投影特定的光模式到物体上, 并通过检测反射光的变形来获取物体的三维形状;ToF法:通过测量光线从发射到反射回来的时间来估计物体的距离
机器人配件行星滚柱丝杠生产企业
汉江机床完成滚柱直线导轨副等15项丝杠产业新产品开发;鼎智科技在微型行星滚柱丝杠的研发与生产上已有里程碑式达成
人形智能机器人传感器与执行器类型拆解
手部结构采用和人体相同的五指多关节设计,执行器为螺杆旋转带动齿轮旋转进而使手指关节旋转的结构,使用较为经典的六电机驱动方式,拇指采用双电机驱动弯曲和侧摆
人形机器人潜在市场规模千亿级别,增速迅猛
全球人形机器人市场估计为5.6亿美元,而到2027年预计市场 规模将达到141亿美元,CAGR达58.5%,2027年中国人形机器人市场有望达到23亿美元,CAGR达56.4%
国产人形机器人-傅利叶ExoMotus
傅利叶智能在康复机器人领域的产品矩阵已经基本成型,自主研发的ArmMotus™ EMU三维上肢康复机器人、ExoMotus ™下肢康复机器人
国产人形机器人-优必选 WalkerX
Walker X身高130cm,体重63kg,具有41个高性能伺服驱动关节,最高时速为3km/h ,面部160°环绕4.6K高清双柔性曲面屏,配备便捷可拆卸电池
国产人形机器人-小米CyberOne
人形仿生机器人CyberOne,高1.77米,重52kg,内部名称铁大,配备Mi-Sense深度视觉模块,搭配AI算具备感知3D空间并识别个体,手势和表情的能力;凭借自主研发的MiAI环境语义识别引擎和MiAI语音情感识别引擎 |
| 智能运输机器人 |
| AGV无人运输机器人-料箱版 |
| AGV无人运输机器人-标准版 |
| AGV无人运输机器人-料箱版(钣金材质) |
| AGV无人运输机器人-货架版(钣金材质) |
| AGV无人运输机器人-货架版(亮面不锈钢材质) |
| AGV无人运输机器人-开放版 |
| 行业动态 |
