
| 详细信息 |
为什么要发展人形机器人 |
| 编辑: 来源:中国平安证券 时间:2023/7/27 |
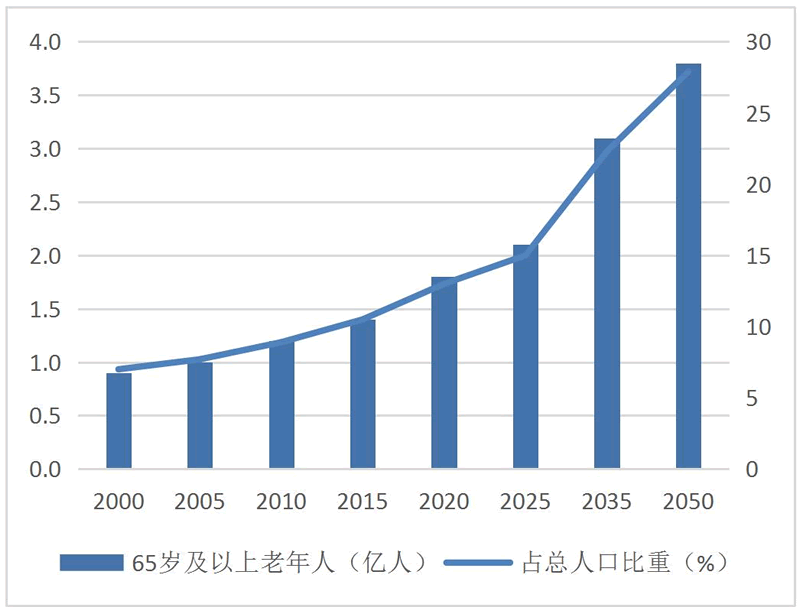
劳动力人口数量持续下滑,美、德、日等多国具有同样趋势。根据统计局发布的数 据显示,2022 年我国人口从年龄构成看,16~59 岁的劳动年龄人口 8.76 亿人,占全国人口的比 重为 62.0%;60 岁及以上人口 2.8 亿人,占全国人口的 19.8%,其中 65 岁及以上人口 2.1 亿人, 占全国人口的 14.9%。劳动年龄人口在 2011 年前后已经达到峰值 9.4 亿人,之后开始负增长。 十多年间,劳动年龄人口减少超过 6000 万。世界银行发布的数据显示,美国的劳动年龄人口自 2010 年开始就加速减少,日本、德国和英法意拥有同样的人口结构变化趋势。 65 岁以上人口比例持续增加, 2050 年 65 岁以上人口比例将达 16%。根据《中 国发展报告 2020:人口老龄化的发展趋势和政策》预测,2025 年“十四五”规划完成时, 65 岁及以上的老年人将超过 2.1 亿,占总人口数的约 15%;2035 年和 2050 年时, 65 岁及以上的老年人将达到 3.1 亿和接近 3.8 亿,占总人口比例则分别达到 22.3%和 27.9%。 联合国数据显示,2021 年 65 岁及以上人口为 7.61 亿,到 2050 年这一数字将增加到 16 亿, 80 岁及以上的人口增长速度更快。根据《世界人口展望 2022》的数据显示,2022 年 65 岁以上 人口占总人口比例为 10%,到 2050 年将升至 16%。
制造业劳动力总量下降,且年轻劳动力占比快速下降。根据统计局数据,2015-2020 年,制造企业平均用工人数由 8711 万人下滑至 6550 万人,远G于同期营业收入 3%水平的降幅。 从年龄结构看,2015 年制造业劳动力 30 岁以下占比 28.2%,30-45 岁占比 45.7%,45 岁以上 占比 26.2%,到了 2019 年,制造业劳动力 30 岁以下占比 21.4%,30-45 岁占比 46.1%,45 岁 以上占比 32.4%,制造业劳动力年龄老化速度过快。 美国制造业人数下降,比例已降至历史低水平。根据财经大学国际金融研究中心客座 研究员张启迪《重新审视美国制造业的“衰落”》,自 1939 年以来美国制造业就业人数持续增长, 至 1978 年达到D峰(1933 万人)。2022 年美国制造业就业人数为 1298 万人,占全部就业的比 重仅为 8%,处于历史低水平。 人力成本持续上升,机器替代人是一大趋势。根据政府网,从 2022 年第三季度全国“ 缺工”的 100 个职业排行看,其中有 39 个属于生产制造及有关人员,有 19 个属于专业技术人 员。从缺工岗位看,主要缺的是劳动密集型行业低技能一线员工和部分专业技术人员。“在劳动 年龄人口下降、劳动力供给趋紧、人工成本上升的背景下,用机器替代流水线上的简单重复劳 动是一大趋势。”人民大学就业研究所所长曾湘泉说。根据 Reshoring Institute 报告, 13 个制造业基层员工薪资中,德、美、英人均年薪超过 3 万美元,在人力方面已 不再是低成本 是大的机器人市场,21 年机器人增速创新G。根据国际机器人联合会(IFR) 发布的《2022 年机器人报告》,2021 年工厂新安装 51.7 万台机器人,同比增长 31%, 创下历史新G。运行中的机器人存量约为 350 万台,亦创下了新的纪录。作为D一大 工业机器人市场, 2021 年安装量增长 51%,新安装 26.82 万台。运行存量突破 100 万台大 关,增长 27%。
|
| 【声明:转载此文出于传递更多信息之目的,并不意味着赞同其观点或证实其描述,文章内容仅供参考,如有侵权,请联系删除。】 |
| 推荐信息 |
|
谐波减速器和RV减速器比较
谐波减速器体积小,质量小,在多关节机器人小臂,腕部,手部等部件具有较强优势;RV减速器负载能力和刚度高,耐疲劳性能好,常用于机器人机身的腰,上臂,下臂等
机器人配件减速器相关企业
哈默纳科从事谐波减速器,机电一体化产品;日本新宝从事精密减速机,变速机的开发;绿的谐波实现了精密谐波减速器的规模化生产及销售
机器人的外部传感器有哪些
迎宾服务机器人外部传感器用来检测机器人所处环境,用于使机器人更准确地获取周围环境情况,与实现特定功能相关的传感器包括气体识别传感器,局放传感器等
机器人的内部传感器有哪些
机器人部传感器用来检测机器人本身状态(如手臂间角度)的传感器,为控制系统提供反馈信息,包括位移传感器、速度/角速度传感器,加速度传感器
服务机器人应用场景高度细分,通用化或为盈利重要突破方向
将走向硬件标准化+软件通用化,实现场景初步整合,零部件标准化:相似功能的机器人使用相同零部件,最大化单一零部件产量,降低成本
提高MEMS IMU精度有两种途径
采用新材料,新工艺,新技术和新方法;采用软件算法修正来提高微型惯性传感器的精度,误差模型可以分为静态误差模型,动态误差模型和随机误差模型
MEMS IMU 误差类型
MEMS惯性传感器零偏参数误差主要包含零偏,零偏稳定性与重复性导致的误差;刻度因数的误差将直接带来测量的系统偏差
惯性传感器中存在系统误差和随机误差
所谓系统误差是指非随机误差,是比例因子非线性误差;随机误差一般指噪声,主要包含随机行走误差和零偏不稳定性误差 |
| 智能运输机器人 |
| AGV无人运输机器人-料箱版 |
| AGV无人运输机器人-标准版 |
| AGV无人运输机器人-料箱版(钣金材质) |
| AGV无人运输机器人-货架版(钣金材质) |
| AGV无人运输机器人-货架版(亮面不锈钢材质) |
| AGV无人运输机器人-开放版 |
| 行业动态 |
