
| 详细信息 |
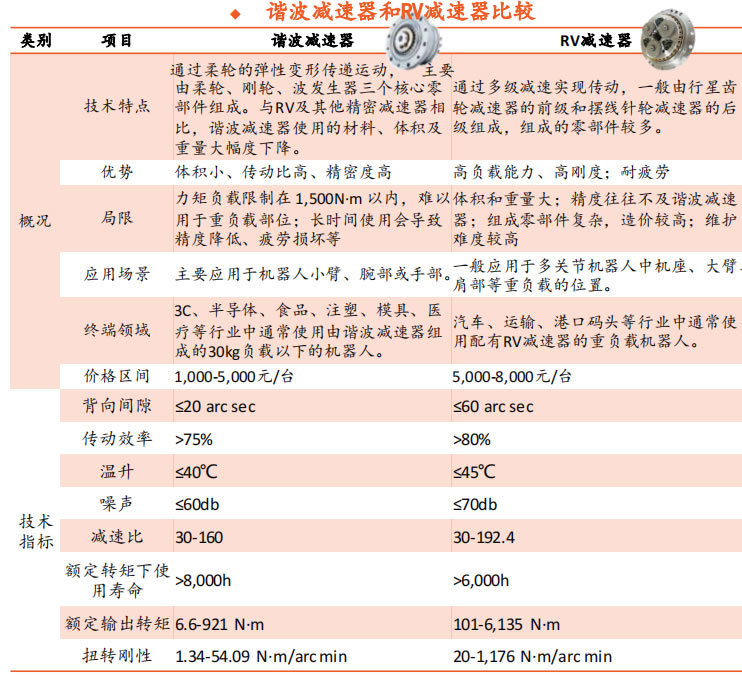
谐波减速器和RV减速器比较 |
| 编辑: 来源:中国平安证券 时间:2023/7/27 |
谐波减速器和RV减速器各有所长。谐波减速器 体积小、质量小、运动精度G、单J传动比大, 在多关节机器人小臂、腕部、手部等部件具有较强优势。RV减速器负载能力和刚度G,耐疲劳性能好,目前通常用于工业机器人机身的腰、 上臂、下臂等大惯量、G转矩输出关节的回转 减速。 与RV减速器相比,谐波减速器在人形机器人中 的应用可能更为广泛。人形机器人使用的减速 器并没有固定选择,各参与者处于探索阶段, 谐波、RV、行星减速器等均有尝试。人形机器 人的关节较现有的多关节工业机器人负载轻, 且机器人本体控制重量和体积的要求较G,因 此小型轻质、G精度的谐波减速器在人形机器 人中的应用可能将更为广泛。
|
| 【声明:转载此文出于传递更多信息之目的,并不意味着赞同其观点或证实其描述,文章内容仅供参考,如有侵权,请联系删除。】 |
| 推荐信息 |
|
机器人配件减速器相关企业
哈默纳科从事谐波减速器,机电一体化产品;日本新宝从事精密减速机,变速机的开发;绿的谐波实现了精密谐波减速器的规模化生产及销售
机器人的外部传感器有哪些
迎宾服务机器人外部传感器用来检测机器人所处环境,用于使机器人更准确地获取周围环境情况,与实现特定功能相关的传感器包括气体识别传感器,局放传感器等
机器人的内部传感器有哪些
机器人部传感器用来检测机器人本身状态(如手臂间角度)的传感器,为控制系统提供反馈信息,包括位移传感器、速度/角速度传感器,加速度传感器
服务机器人应用场景高度细分,通用化或为盈利重要突破方向
将走向硬件标准化+软件通用化,实现场景初步整合,零部件标准化:相似功能的机器人使用相同零部件,最大化单一零部件产量,降低成本
提高MEMS IMU精度有两种途径
采用新材料,新工艺,新技术和新方法;采用软件算法修正来提高微型惯性传感器的精度,误差模型可以分为静态误差模型,动态误差模型和随机误差模型
MEMS IMU 误差类型
MEMS惯性传感器零偏参数误差主要包含零偏,零偏稳定性与重复性导致的误差;刻度因数的误差将直接带来测量的系统偏差
惯性传感器中存在系统误差和随机误差
所谓系统误差是指非随机误差,是比例因子非线性误差;随机误差一般指噪声,主要包含随机行走误差和零偏不稳定性误差
人形智能机器人借助IMU实现定位、平衡及姿态检测
惯性传感器采集的角速度与加速度等惯性信息可以用于推算人形机器人的实时位置与运动轨迹,与机器人搭载的多传感器融合,在数据类型和数据频率间实现互补 |
| 智能运输机器人 |
| AGV无人运输机器人-料箱版 |
| AGV无人运输机器人-标准版 |
| AGV无人运输机器人-料箱版(钣金材质) |
| AGV无人运输机器人-货架版(钣金材质) |
| AGV无人运输机器人-货架版(亮面不锈钢材质) |
| AGV无人运输机器人-开放版 |
| 行业动态 |
