
| 详细信息 |
机器人零部件-减速器,决定机器人的精度和负载 |
| 编辑: 来源:西南证券 时间:2023/8/11 |
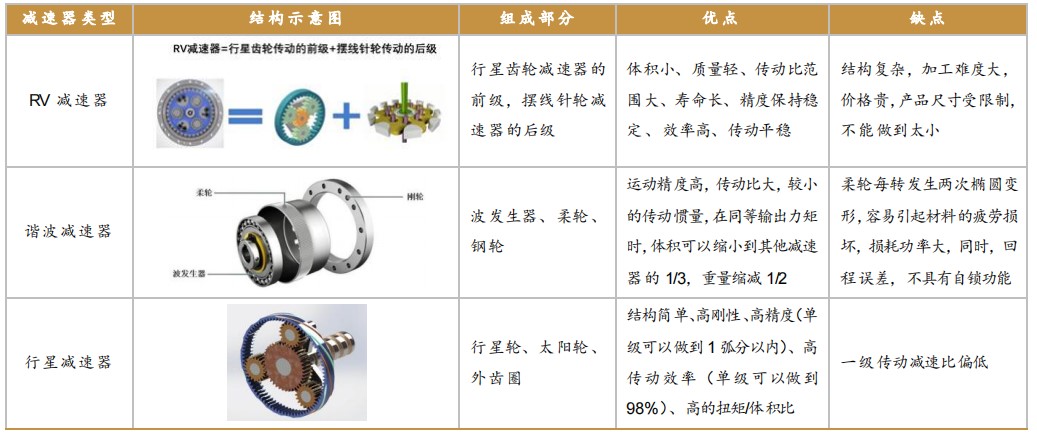
精密减速器主要用于机器人各个关节,负责将伺服电机输出的G速运转动力转化为低转 速、G转矩的运动,决定机器人的精度和负载。一般传动减速器控制精度低,可满足机械设 备基本的动力传动需求。精密减速器精度较G、使用寿命长,更加可靠稳定,应用于机器人、 数控机床等G端L域,包括谐波减速器、RV 减速器、行星减速器等,其中应用广泛的是 用于重负载转传动的 RV 减速器和用于轻负载传动的谐波减速器。 行星减速器结构简单,减速比较低。精密行星减速器体积比较小,结构较为简单,主要 包括行星轮、太阳轮和内齿圈。精密行星减速器传动比都在 10 以内,且减速J数一般不会 超过 3 J,相较于其他减速器启动更加平稳,且刚性、精度和扭矩G,主要搭配步进电机和 伺服电机,用以降低转速,提升扭矩。 谐波减速器结构简单,减速比大,传动精度和传动效率较G。谐波减速器主要由 3 个基 本部件构成:刚轮、柔轮、谐波发生器,通过具有柔性的薄壁外齿齿轮产生弹性变形后与刚 性的内齿轮进行内啮合来实现传动。 RV 减速器结构较为复杂,承载能力强,传动精度G。RV 减速器是以摆线针轮行星传动 为基础发展而来的。RV 减速器主要包括两J传动装置,分别为渐开线行星齿轮传动和摆线 针轮行星传动。
|
| 【声明:转载此文出于传递更多信息之目的,并不意味着赞同其观点或证实其描述,文章内容仅供参考,如有侵权,请联系删除。】 |
| 推荐信息 |
|
FSD 技术助力机器人感知世界,擦亮双眼
FSD 算法主要依赖神经网络和计算机视觉技术,提取有关道路,车辆,行人和障碍物的信息,实现环境识别功能,使用占据网络对 3D 空间内的障碍物进行持续检测
特斯拉人形机器人具备的生态优势
人形机器人有上千个零部件,未来也可能通过一体化的方式加快生产制造;自主研发的 AI 训练芯片;商业模式上可直接延续电动车的 “硬+软”收费模式
人形机器人量产时间,2025?
亚马逊投资物流机器 人公司 Agility Robotics,机器人预计 24 年开始交付,25 年全面上市,英伟达发布专为机器人开发打造的平台 Isaac,大幅降低机器人开发难度
中国发展人形机器人具备成本、场景和产业链三大优势
机器人硬件成本上国内有巨大的优势;机器人发展的整个产业链以及落地场景都能在中国找到;机器人产业已基本形成了从零部件到整机再到集成应用的全产业链体系
人形机器人商业化前景,到 2026年全球人形机器人市场规模将达到80亿美元
到2026年全球人形机器人市场规模将达到80亿美元;高 盛预计到2035年,在蓝海市场情景下,人形机器人市场能够达到 1540 亿美元的规模
智能机器人Ameca表情最像人是怎么做到的
机器人Ameca面部就有 45 个电机,底层技术是 Mesmer+ Tritium,其中眼睛就有 8 个电机对其进行控制,眉毛有 4 个电机,嘴巴则有 2 个电机
什么是 Robot GPT
RobotGPT 的原理可理解为文字/语言/各类传感器 接收的信号-动作接龙,机器人实现不同的智能需配备不同传感器,自然语言处理能力和人工智能算法
什么是具身智能?
具身智能涉及多学科,是系统性工程;具身智能包括3个模块:具身感知,具身想象和具身执行,AI+机器人 正是具身智能当前的落点,有望加速推动具身智能落地 |
| 智能运输机器人 |
| AGV无人运输机器人-料箱版 |
| AGV无人运输机器人-标准版 |
| AGV无人运输机器人-料箱版(钣金材质) |
| AGV无人运输机器人-货架版(钣金材质) |
| AGV无人运输机器人-货架版(亮面不锈钢材质) |
| AGV无人运输机器人-开放版 |
| 行业动态 |
