
| 详细信息 |
柔性传感器在机器人增强的智能感知系统中进展 |
| 编辑: 来源:CAAI认知系统与信息处理专委会 时间:2023/6/16 |
感知是指外界刺激作用于感官时,大脑对外界的整体看法和理解,为我们对外界的感官信息进行组织和解释。在认知科学中,也可看作一组程序,包括获取信息、理解信息、筛选信息和组织信息。其中,信息获取是实现感知过程重要且要的环节。人类和G等动物拥有丰富的感觉器官,可以通过视觉、听觉、味觉、触觉、嗅觉和直觉(第六感)感受外界刺激,获取环境信息。受此启发,研究人员研制出一系列可媲美甚至超越人类感官能力的柔性传感器。与传统、笨重、刚性材料的电子器件不同,柔性传感器表现出d特的柔韧性能、可拉伸性能和传感性能,这些特性可以通过引入功能材料和创新结构得到进一步提升。柔性传感器可以在动态和不规则表面上形成紧密附着,大大减少外界刺激的干扰,实现G保真、G精度的数据采集。 利用不断发展的人工智能技术构建模仿人类感知过程的智能感知系统,是实现真正智能化的有效途径。智能感知不仅包括各种柔性传感器获取外界信息和数据的能力,还包括通过记忆、学习、判断、推理等过程感知环境、材料种类和物体属性的能力(图1)。G性能柔性传感器采集大量信息数据,然后使用机器学习算法进行分析和处理。与传统算法不同,机器学习是一类从数据中自动分析规律,并利用规律对未知数据进行预测的算法,并且它们在智能感知系统中往往具有更好的预测能力。
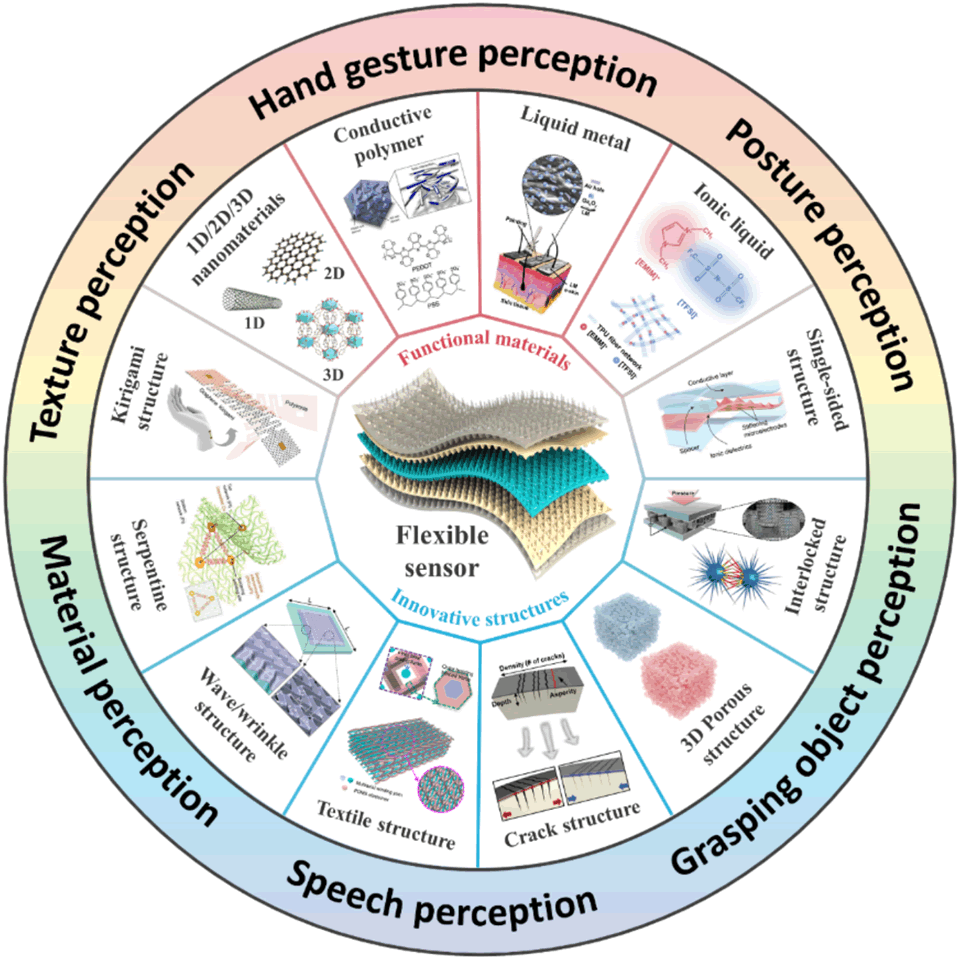
这篇综述重点介绍了柔性传感器及其智能感知系统的新研究进展。特别是,我们全方位回顾了构建柔性传感器具代表性的功能材料和创新结构,并讨论了基于不同环境信息的各种机器学习算法辅助智能感知系统。功能材料包括1D/2D/3D纳米材料、导电聚合物、液态金属、离子液体;创新结构包括单面、互锁、3D多孔、裂纹、纺织、波浪/皱纹、蛇形线和剪纸结构;智能感知系统包括手势感知、姿态感知、抓取物体感知、纹理感知、语音感知和材料感知(图2)。后,详细讨论了柔性传感器及其相应的智能感知系统面临的挑战和未来机遇。由于此类研究仍处于起步阶段,本文所涵盖的工作主要来自近些年。然而,随着该L域的不断成熟,终会有足够数量的技术迭代,以提供更全面的视角和演变时间表。
展望未来,尽管近年来在柔性传感器和机器学习技术L域取得了长足进步,并且两者交叉融合所构建的智能感知系统为人工智能下一阶段的发展提供了新的机遇,但在单个L域或两者的交叉点仍有许多挑战需要解决
|
| 【声明:转载此文出于传递更多信息之目的,并不意味着赞同其观点或证实其描述,文章内容仅供参考,如有侵权,请联系删除。】 |
| 推荐信息 |
|
如何看待机器人性别
人们将机器人拟人化,包括假定性别,即使机器人不是类似人类或动物形态的,人类依靠物理线索来投射类人机器人的性别
一种具有连续高分辨率触觉传感的机器人软体手
每个手指都包含两个摄像头,可以沿着手指的正面和侧面收集触觉数据,抓取器可以对物体进行包裹着抓取,在一次抓取中提取大量丰富的触觉数据
特斯拉的人形机器人,穿戴遥操作示教的机器人学习
使用电机扭矩控制操纵人形机器人腿部的运动,让机器人落脚力度保持轻缓;特斯拉为人形机器人添加了环境发现与记忆的能力
机械手分层感应运动控制框架
基于神经系统分层感觉运动控制器的框架通过布置高密度触觉传感器阵列在机器人手的表面,获取感知对象的接触状态,包括接触力,压力分布和表面形状等信息
仿人类运动感觉的电子皮肤对下一代机器人有很大的前景
人造皮肤可以同时模仿自然皮肤的感官反馈和机械特性,通过对材料性能,器件结构和系统架构的合理设计和工程化,开发了一种单片软性假肢电子皮肤
机器人研究的灵感可以轻松地从大自然中汲取
机器人的运动控制系统也根据动物和人类神经科学的经验教训进行了设计,设计具有适应性,感知性和与环境交互的机器人控制系统提供了一个独特的平台
机器人手势识别研究不断发展
纳米网格将电阻从细小皮肤拉伸转化为本体感觉;这种方法类似于人类皮肤受体如何为手部运动识别提供信号模式,具有用于快速手部任务识别的元学习
迎宾机器人柔性软体关节的灵巧手
机器人柔性软体关节的灵巧手通过向手指施加空气或液压压力来使灵巧手指弯曲,柔软性和交互性能好,不足之处是关节承受能力差,手指弯曲抓力不足 |

| 智能运输机器人 |
| AGV无人运输机器人-料箱版 |
| AGV无人运输机器人-标准版 |
| AGV无人运输机器人-料箱版(钣金材质) |
| AGV无人运输机器人-货架版(钣金材质) |
| AGV无人运输机器人-货架版(亮面不锈钢材质) |
| AGV无人运输机器人-开放版 |
| 行业动态 |
