
| 详细信息 |
机器人通过充分接触物体实现灵巧操作 |
| 编辑: 来源:CAAI认知系统与信息处理专委会 时间:2023/10/16 |
人类通常擅长全身操纵,但机器人却很难胜任此类任务。对机器人来说,盒子可能接触到搬运者手指、手臂和躯干上任何一点的每一个位置,都代表着一个接触事件,机器人需要对其进行推理。由于潜在的接触事件数以亿计,这项任务的规划工作很快就变得难以完成。 现在,麻省理工学院的研究人员找到了一种简化这一过程的方法,这种方法被称为 "富接触操纵规划"。他们使用了一种称为平滑的人工智能技术,这种技术能将许多接触事件归纳为数量较少的决策,从而使即使是简单的算法也能为机器人快速确定有效的操纵计划。 虽然这种方法仍处于早期阶段,但它有可能使工厂使用较小的移动机器人,这些机器人可以用整个手臂或身体来操纵物体,而不是只能用指尖抓取的大型机械臂。这可能有助于减少能耗,降低成本。此外,这种技术还可用于执行火星或其他太阳系天体探索任务的机器人,因为它们只需使用机载计算机就能快速适应环境。
"电气工程与计算机科学(EECS)专业研究生 H.J. Terry Suh 是这项技术相关论文的共同D一作者,他说:"如果我们能够利用模型来利用这类机器人系统的结构,那么就有机会加快做出这些决策和制定接触丰富的计划的整个过程,而不是把它当作一个黑盒子系统。 与 Suh 一起参与论文撰写的还有共同D一作者、波士顿动力人工智能研究所的机器人专家 Tao Pang 博士(23岁),电子工程与电子科学研究生杨璐洁,以及资深作者 Russ Tedrake,他是电子工程与电子科学系、航空航天系和机械工程系的丰田教授,也是计算机科学与人工智能实验室(CSAIL)的成员。这项研究成果将于本周发表在《电气和电子工程师学会机器人技术论文集》(IEEE Transactions on Robotics)上。 ▍关于机器人的强化学习 强化学习是一种机器学习技术,在这种技术中,代理(如机器人)通过试错来学习完成任务,并在接近目标时获得奖励。研究人员说,这种学习方式采用的是黑箱方法,因为系统需要通过试错来了解世界的一切。 它已被有效地应用于接触式操纵规划,在这种规划中,机器人试图学习以特定方式移动物体的佳方法。 但是,由于机器人在决定如何使用手指、手掌、手臂和身体与物体互动时,需要对数十亿个潜在接触点进行推理,因此这种试错方法需要大量计算。 “强化学习可能需要经过数百万年的模拟时间才能真正学习策略,”Suh 补充道。 另一方面,如果研究人员利用他们对系统的了解以及他们希望机器人完成的任务专门设计一个基于物理的模型,那么该模型就会包含有关这个世界的结构,从而使其更加G效。 然而,当涉及丰富的接触操作计划时, 基于物理的方法并不像强化学习那么有效——Suh 和 Pang 想知道为什么。
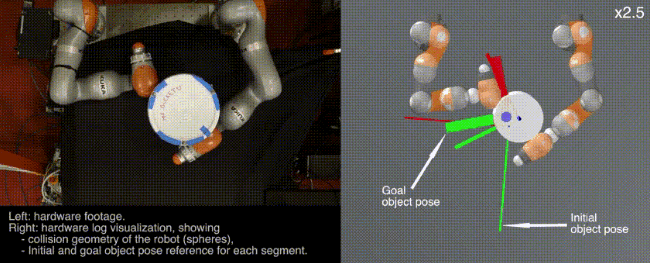
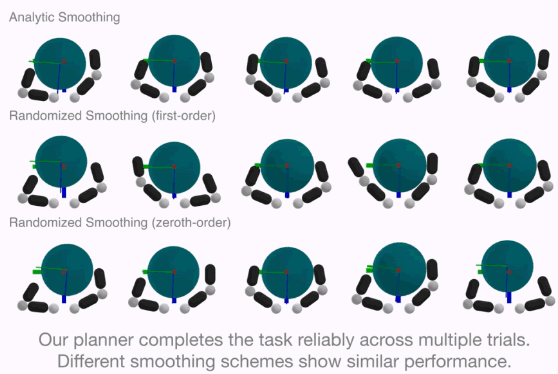
他们进行了详细分析,发现一种被称为平滑的技术能让强化学习表现如此出色。 机器人在决定如何操纵物体时,可能做出的许多决定在整体上并不重要。例如,一根手指的每一次微小调整,无论是否会导致与物体的接触,都不太重要。平滑平均消除了许多不重要的中间决策,留下了一些重要的决策。 强化学习通过尝试多个接触点,然后计算出结果的加权平均值,从而隐性地实现平滑。根据这一见解,麻省理工学院的研究人员设计了一个简单的模型,该模型可以执行类似的平滑处理,使其能够专注于机器人与物体之间的核心互动,并预测长期行为。他们的研究表明,这种方法在生成复杂计划方面与强化学习一样有效。 "Pang 说:"如果对问题有更多的了解,就能设计出更有效的算法。 ▍如何将算法进行重新组合是个问题 尽管平滑处理大大简化了决策,但搜索剩余决策仍然是一个难题。因此,研究人员将他们的模型与一种算法相结合,这种算法可以快速G效地搜索机器人可能做出的所有决定。 通过这种组合,在标准笔记本电脑上的计算时间缩短到约一分钟。 他们先在模拟实验中测试了自己的方法,在模拟实验中,机器人的手被赋予了移动钢笔到所需配置、开门或拿起盘子等任务。在每种情况下,他们基于模型的方法都取得了与强化学习相同的性能,但所需时间只有强化学习的一小部分。当他们在真实机械臂上对模型进行硬件测试时,也看到了类似的结果。 实现全身操纵的理念同样适用于灵巧的人手规划。特德拉克说:"以前,大多数研究人员都认为强化学习是适用于灵巧双手的方法,通过从强化学习中提取(随机)平滑这一关键思想,他们可以让更多传统的规划方法也非常有效。" 然而,他们开发的模型依赖于对真实世界的简单近似,因此无法处理非常动态的运动,例如物体坠落。他们的方法虽然对速度较慢的操纵任务有效,但无法创建一个能让机器人将易拉罐扔进垃圾桶的计划。未来,研究人员计划改进他们的技术,使其能够处理这些G动态运动。
|
| 【声明:转载此文出于传递更多信息之目的,并不意味着赞同其观点或证实其描述,文章内容仅供参考,如有侵权,请联系删除。】 |
| 推荐信息 |
|
仿生SA机械感受器自适应地测量物体的材料柔软度
仿生SA机械感受器的多层结构能够检测皮肤信号,包括接触压力和侧应变;仅仅依靠柔度不足以充分理解材料柔软度和尺寸因素(如厚度)对物体变形能力的贡献
软体机械手的触觉传感技术研究-针对不同典型触觉传感器的主要性能对比分析
算法的有效性不足;欠缺可靠的控制策略;降低软抓手的复杂触觉感知系统的成本;在3D打印的基础上发展可以从多个参数进行调整的增材制造技术
ChatGPT作为招聘人员
提供一些关于职位空缺的信息,而你 的工作是制定寻找合格申请人的策略。这可能包括通过社交媒体、 社交活动甚至参加招聘会接触潜在候选人
ChatGPT作为网络安全专家
提供一些关于如何存储和共享数 据的具体信息,而你的工作就是想出保护这些数据免受恶意行为者 攻击的策略。这可能包括建议加密方法、创建防火墙或实施将某些 活动标记为可疑的策略
ChatGPT作为UX/UI开发人员
提供有关应用程序、网站或 其他数字产品设计的一些细节,而你的工作就是想出创造性的方法 来改善其用户体验
ChatGPT担任AI写作导师
提供一名需要帮助改进其 写作的学生,您的任务是使用人工智能工具向学生提供有关如何改进其作文的反馈,来建议学生可以更好地以书面形式 表达他们的想法和想法的方法
ChatGPT担任数学老师
提供一些数学方程式或概念,你 的工作是用易于理解的术语来解释它们。这可能包括提供解决问题 的分步说明、用视觉演示各种技术或建议在线资源以供进一步研究
ChatGPT充当哲学老师
提供一些与哲学研究相关的话题,你的 工作就是用通俗易懂的方式解释这些概念。这可能包括提供示例、 提出问题或将复杂的想法分解成更容易理解的更小的部分 |
| 智能运输机器人 |
| AGV无人运输机器人-料箱版 |
| AGV无人运输机器人-标准版 |
| AGV无人运输机器人-料箱版(钣金材质) |
| AGV无人运输机器人-货架版(钣金材质) |
| AGV无人运输机器人-货架版(亮面不锈钢材质) |
| AGV无人运输机器人-开放版 |
| 行业动态 |
