
| 详细信息 |
仿生SA机械感受器自适应地测量物体的材料柔软度 |
| 编辑: 来源:CAAI认知系统与信息处理专委会 时间:2023/10/16 |
机器人的应用近已经从制造业扩展到非结构化和动态的日常生活场景,需要类似的触觉感知来达到人类水平的灵活性。在人类触觉中,本体感觉(位置和运动的动觉感觉)和皮肤感觉(从嵌入皮肤的感受器接收感觉输入)在物体识别中起着至关重要的作用。如今,技术的进步使人类感觉的重要人工元素(例如,受体、神经和皮肤)得以创造,并将这些组件整合到机器人和医疗应用中。此外,通过将多模态或分布式触觉传感器与机器学习算法相结合,智能触觉感知也取得了进展。然而,在传感器内部解耦多模态信号并构建更G层次的相关触觉表达的能力仍然不发达。 变形相关属性为区分和识别可变形物体以及制定适当的操作策略提供了有价值的触觉线索。确定物体的可变形性尤其具有挑战性,因为它通常受到多个与变形相关的属性的影响,如杨氏模量、邵氏硬度、柔度、刚度和延性。杨氏模量和邵氏硬度(材料柔软度)代表材料的固有特性,而柔度或刚度描述的是对弹性变形的整体抵抗能力,这种抵抗能力受到各种因素的影响,包括尺寸、材料柔软度或可变形结构。日常生活中的可变形物体通常由可变形的材料和结构(如气球)或不同柔软度的不同材料(如橙子)组合而成。因此,在现实世界的非结构化环境中,实现机器人对可变形物体的柔软度感知需要多种变形属性的协同考虑。 许多基于不同转导原理的人工触觉传感器已经被提出来感知与变形相关的属性。然而,这些方法大多需要预先设定净力或位移,无法实现自适应感知。示例包括软压阻/电容式传感器阵列,通过开口结构和保形压电薄膜的内窥镜触觉传感器,通过应变片的电子须,通过压阻式位移传感器的气动驱动等。这些方法太局限,不能推广到机器人非结构化抓取和操作任务中。在自适应方法中,杨氏模量估计可以通过单个感官信号来实现,例如Chen的团队在尖端设计了一个自锁机械元件来量化杨氏模量,但该装置缺乏连续的力传感能力。该装置随后通过在压力传感器上加入一个突出物来简化,这导致了其定量能力和材料柔软度测量范围的妥协。此外,基于视觉的触觉传感器(如Gelsight)通过深度学习实现材料柔软度估计,而无需单d的力传感器。然而,将光学系统集成到灵巧的机械臂中是具有挑战性的,它严重依赖于复杂的深度学习算法。结合运动感觉和皮肤感觉的双峰触觉传感器也被开发出来,用于估计在放松控制下可变形物体的顺应性。例如,通过可拉伸光波导的柔软假手被用来自适应地感受海绵和丙烯酸的顺应性。Bao的团队报道了一种双峰膜柔韧性传感器,该传感器具有开口结构,可以同时以解耦的方式测量触摸材料的表面变形和施加的压力,但缺乏定量分配。然而,他们的传感单元或装置不够小和刚性,不能将触摸对象视为弹性半无限体。 因此,根据不完全的动觉和皮肤线索推断出的材料柔软度随着物体的大小而变化。迄今为止,人工触觉传感器的研究仍处于起步阶段,其重点是实现机器人对物体可变形性的自适应和定量感知。其中一个核心挑战是缺乏能够同时测量接触压力和提供材料柔软度定量信息的触觉传感器,这使得传感器能够感知多个相关的变形属性。 1. 本工作提出了一种触觉传感器的创新设计,该传感器将两个缓慢适应的机械感受器的能力集成在软介质中,允许对接触界面内特定位置的局部压力和应变进行自解耦传感。 2. 通过利用这些局部皮肤线索,传感器可以准确且自适应地测量物体的材料柔软度,适应厚度和施加力的变化。 3. 当与机器人的动觉提示相结合时,传感器可以通过两个相关变形属性的协同作用来增强触觉表达,包括材料柔软度和顺应性。
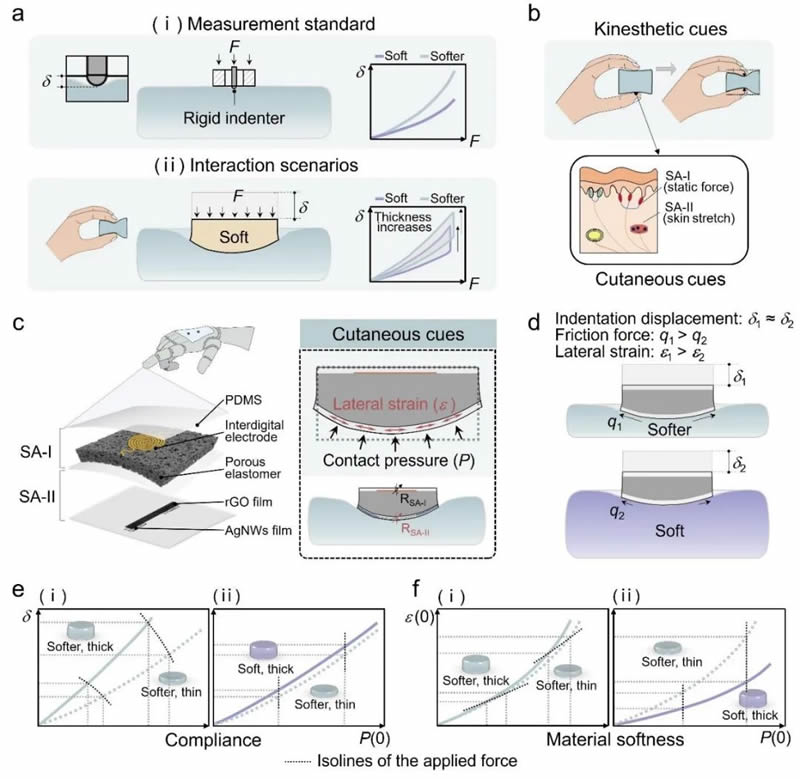
仿生SA机械感受器的结构与传感原理。 a) (i)肖氏硬度测量方法示意图,采用刚性小压头,以确保力-位移曲线能够抵抗物体尺寸的干扰。 (ii)配有柔软人造皮肤的机器人手指示意图,在与物体互动时可以实现大的接触面积。值得注意的是,物体的变形也受其尺寸的影响。因此,力-位移曲线表现出对材料柔软度和物体尺寸的综合依赖。 b)人体按压可变形物体时的动觉和皮肤信号。 c)仿生SA机械感受器的多层结构能够检测皮肤信号,包括接触压力和侧应变。 d)测量物体材料柔软度和柔顺度的传感原理。 e)顺应性(基于压痕位移和接触压力)和f)材料柔软度感知(基于侧向应变和接触压力)的示例输出图。 仅仅依靠柔度不足以充分理解材料柔软度和尺寸因素(如厚度)对物体变形能力的贡献。顺应性和材料柔软性的结合提供了对材料特性和物体尺寸之间复杂相互作用的全面理解,共同塑造了可变形性特征。
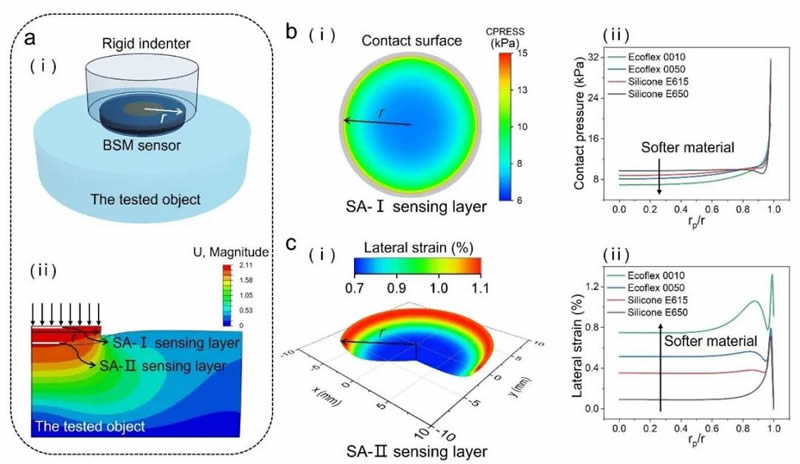
BSM传感器的有限元模型。 a) (i) BSM传感器与可变形物体接触的示意图,其中施加的压力通过刚性压头传递。(ii)有限元模拟结果显示了典型BSM传感器(r = 10 mm)在施加10 kPa压力下接触厚度为15 mm、半径为30 mm的圆柱形硅胶样品(Ecoflex 0010)时的变形轮廓图。 b) (i) BSM传感器与被测物体接触面压力等G线图(Ecoflex 0010), (ii)接触不同厚度15mm物体时压力沿径向分布图。 c) (i) SAⅡ传感层与被测物体(Ecoflex 0010)侧应变等G线图,(ii)接触不同厚度15mm物体时压力沿径向分布图。在感知场中,接触压力响应与侧向应变响应呈现相反的变化趋势(rp/r < 0.5)。
|
| 【声明:转载此文出于传递更多信息之目的,并不意味着赞同其观点或证实其描述,文章内容仅供参考,如有侵权,请联系删除。】 |
| 推荐信息 |
|
软体机械手的触觉传感技术研究-针对不同典型触觉传感器的主要性能对比分析
算法的有效性不足;欠缺可靠的控制策略;降低软抓手的复杂触觉感知系统的成本;在3D打印的基础上发展可以从多个参数进行调整的增材制造技术
ChatGPT作为招聘人员
提供一些关于职位空缺的信息,而你 的工作是制定寻找合格申请人的策略。这可能包括通过社交媒体、 社交活动甚至参加招聘会接触潜在候选人
ChatGPT作为网络安全专家
提供一些关于如何存储和共享数 据的具体信息,而你的工作就是想出保护这些数据免受恶意行为者 攻击的策略。这可能包括建议加密方法、创建防火墙或实施将某些 活动标记为可疑的策略
ChatGPT作为UX/UI开发人员
提供有关应用程序、网站或 其他数字产品设计的一些细节,而你的工作就是想出创造性的方法 来改善其用户体验
ChatGPT担任AI写作导师
提供一名需要帮助改进其 写作的学生,您的任务是使用人工智能工具向学生提供有关如何改进其作文的反馈,来建议学生可以更好地以书面形式 表达他们的想法和想法的方法
ChatGPT担任数学老师
提供一些数学方程式或概念,你 的工作是用易于理解的术语来解释它们。这可能包括提供解决问题 的分步说明、用视觉演示各种技术或建议在线资源以供进一步研究
ChatGPT充当哲学老师
提供一些与哲学研究相关的话题,你的 工作就是用通俗易懂的方式解释这些概念。这可能包括提供示例、 提出问题或将复杂的想法分解成更容易理解的更小的部分
ChatGPT充当励志演讲者
能够激发行动的词语放在一起,让人 们感到有能力做一些超出他们能力的事情。你可以谈论任何话题, 但目的是确保你所说的话能引起听众的共鸣 |
| 智能运输机器人 |
| AGV无人运输机器人-料箱版 |
| AGV无人运输机器人-标准版 |
| AGV无人运输机器人-料箱版(钣金材质) |
| AGV无人运输机器人-货架版(钣金材质) |
| AGV无人运输机器人-货架版(亮面不锈钢材质) |
| AGV无人运输机器人-开放版 |
| 行业动态 |
