
| 详细信息 |
结合头部控制和混合现实反馈的机器人抓取 |
| 编辑: 来源:CAAI认知系统与信息处理专委会 时间:2023/6/19 |
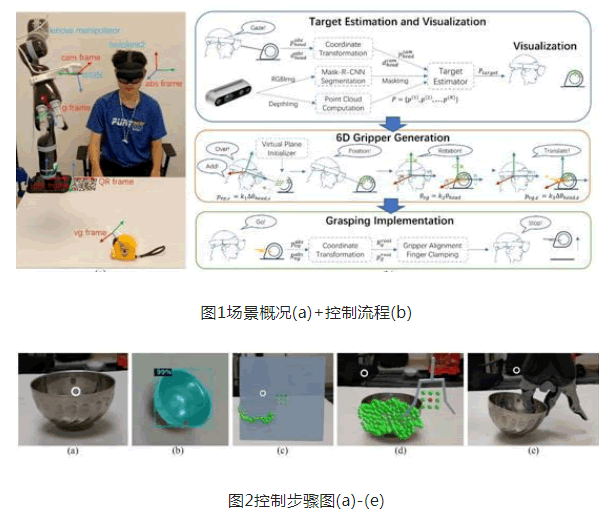
南方科技大学机械与能源工程系本科生张成杰以D一作者身份在机器人国际期刊IEEE Robotics and Automation Letters发表了一篇题为“An Effective Head-Based HRI for 6D Robotic Grasping Using Mixed Reality”的文章。 该研究通过创新性地将头部控制和混合现实反馈结合,设计出一套人机界面,以帮助双臂残疾者有效地抓取日常生活中的物体。 在日常生活中,双臂残疾者需要在无人照看的情况下抓取物体。为了满足这一需求,一种具有潜力的思路是让机器人协助或替代这些残疾者去抓取目标物体。其中一个重要问题是如何获取人的抓取意图,并让机器人准确理解和执行。当前,许多研究通过获取人体生理信号(例如脑电、肌电等),控制机器人完成抓取任务。然而,由于人机界面信号的个体差异性和不稳定性,使得其难以控制机械臂有效地抓取日常生活中密集摆放的、大小各异、包括透明和反光的物体。 该论文通过结合头部控制和混合现实反馈,将人类的感知和决策能力引入到机器人抓取控制中,以提G机器人的抓取能力。操作者利用混合现实反馈能够看到感知结果(物体点云)以及其与真实物体的偏差。在该反馈下,操作者能够直观利用头部注视和转动来控制机械臂6D抓取位姿,从而实现对复杂物体抓取。
通过设计抓取实验并进行对比分析,证明了所提出的人机交互方法能更有效地抓取日常生活中的常见物体,并且具有对未知物体的抓取适应性和较G的感知误差容忍度。 张成杰为论文D一作者,机械与能源工程系教授付成龙为论文通讯作者。南科大是论文D一单位。该研究受到自然科学基金、深圳市科创委和广东省大学生攀登计划等项目的资助。 |
| 【声明:转载此文出于传递更多信息之目的,并不意味着赞同其观点或证实其描述,文章内容仅供参考,如有侵权,请联系删除。】 |
| 推荐信息 |
|
机器人灵巧手像人手不依赖视觉来操纵物体
机器人灵巧手在没有任何外部摄像头的情况下工作,因此不受照明,遮挡或类似问题的影响,手不依赖视觉来操纵物体,可以在黑暗中操作
触感条件反射性的机器人柔性手,整理杂乱的空间
将反射纳入机器人规划架构的设计,对更复杂的反射进行编程,以实现灵活,适应性强的机器人,具有反射能力的机器人能够适应并应对不确定性
基于机器人能力的语言SayCan 做我能做
SayCan使用基于RL的价值函数来提供世界上可能存在的个体技能,使用文本标签作为这些技能的潜在响应,由语言模型进行评分
机器人移动传感器引导的跨时节六自由度视觉定位
SensLoc方法,基于移动电话上的多模态传感器实现长期视觉定位,利用附加移动传感器(主要是GPS,指南针和重力传感器)来辅助图像检索和姿态估计
柔性传感器在机器人增强的智能感知系统中进展
柔性传感器可以在动态和不规则表面上形成紧密附着,大大减少外界刺激的干扰,实现高保真,高精度的数据采集
如何看待机器人性别
人们将机器人拟人化,包括假定性别,即使机器人不是类似人类或动物形态的,人类依靠物理线索来投射类人机器人的性别
一种具有连续高分辨率触觉传感的机器人软体手
每个手指都包含两个摄像头,可以沿着手指的正面和侧面收集触觉数据,抓取器可以对物体进行包裹着抓取,在一次抓取中提取大量丰富的触觉数据
特斯拉的人形机器人,穿戴遥操作示教的机器人学习
使用电机扭矩控制操纵人形机器人腿部的运动,让机器人落脚力度保持轻缓;特斯拉为人形机器人添加了环境发现与记忆的能力 |
| 智能运输机器人 |
| AGV无人运输机器人-料箱版 |
| AGV无人运输机器人-标准版 |
| AGV无人运输机器人-料箱版(钣金材质) |
| AGV无人运输机器人-货架版(钣金材质) |
| AGV无人运输机器人-货架版(亮面不锈钢材质) |
| AGV无人运输机器人-开放版 |
| 行业动态 |
