
| 详细信息 |
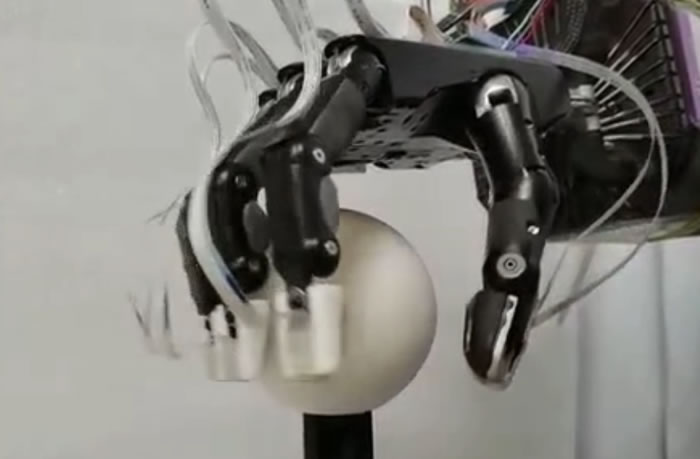
迎宾机器人柔性关节的灵巧手 |
| 编辑: 来源:CAAI认知系统与信息处理专委会 时间:2023/6/16 |
机器人柔性关节的灵巧手是指传动柔性和表面材料柔性,使用该关节的灵巧手,手指弯曲时能够自适应包络在物体表面。 手指传动通过连接两股腱绳并改变其相对位置或使用腱绳和复位弹簧的组合来实现手指关节旋转。许多仿人灵巧手使用了这类关节,如Hannes Hand、KIT Hand、IR2-hand、X-Hand和Soft Hand。这种拟人化的灵巧手被称为柔性灵巧手,通常是欠驱动的,由缠绕在关节轴上的驱动腱绳或关节轴上滑轮拉动旋转,当手指D一个关节被阻碍运动时,其余关节能够自适应弯曲,完成手指包络的过程。 其中,IR2 Hand和X- Hand是其中典型例子。它们使用两个弹性肌腱股线相互配合,通过改变两个肌腱股线的相对位置,实现手指的弯曲和复位。这些灵巧手的缺点是驱动手指屈曲的腱索需要解耦,接头处的结构复杂,需要安装额外的装置以确保反向支撑。
|
| 【声明:转载此文出于传递更多信息之目的,并不意味着赞同其观点或证实其描述,文章内容仅供参考,如有侵权,请联系删除。】 |
| 推荐信息 |
|
迎宾机器人刚性关节的灵巧手
机器人刚性关节的灵巧手通过连杆机构与电机连接或者电机直接驱动关节运动,具有紧凑,高抓持力和高控制精度等优势
AutoML技术路径
1 数据预处理和特征工程自动化;2 超参数优化自动化;3 模型选择自动化;4 模型继承自动化,将多个模型组合起来以提高预测性能的过程
MLOps技术路径
1 需求分析与开发;2 数据工程流水线;3 模型试验流水线;4 DevOps;5 持续训练流水线;6 持续部署流水线;7 持续监控流水线
数据为中心MLOps与模型AutoML为中心的不同
MLOps侧重于用于训练和评估ML模型的数据.数据的质量和数量更关键;AutoML优先考虑寻找最佳算法或神经网络架构来解决手头的问题
平台对于数据驱动的AI重要性
有助于管理数据驱动AI解决方案的可扩展性;共享见解和共同处理数据和模型的工具和功能;帮助跟踪实验,管理模型版本并确保结果的可重复性
以数据为中心的AI应用优势显著
数据驱动的AI可以提高泛化能力;扩充或优化用于训练的数据来微调模型更容易;数据驱动的AI协助模型抵抗对抗性攻击;鼓励迁移学习
以模型为中心的AI应用痛点:资源、成本要求高等
模型驱动的AI通常涉及具有大量参数的复杂模型;模型驱动的AI中复杂模型的训练需要时间长;复杂模型通常较难解释和理解
2016-2022年人工智能产业相关政策梳理
关于规范和加强人工智能司法应用的意见,关于加快场景创新以人工智能高水平应用促进经济高质量发展的指导意见,关于支持建设新一代人工智能示范应用场景的通知 |
| 智能运输机器人 |
| AGV无人运输机器人-料箱版 |
| AGV无人运输机器人-标准版 |
| AGV无人运输机器人-料箱版(钣金材质) |
| AGV无人运输机器人-货架版(钣金材质) |
| AGV无人运输机器人-货架版(亮面不锈钢材质) |
| AGV无人运输机器人-开放版 |
| 行业动态 |
