
| 详细信息 |
机器人操作技能获取,通过遥操作学习的优势 |
| 编辑: 来源:CAAI认知系统与信息处理专委会 时间:2023/7/14 |
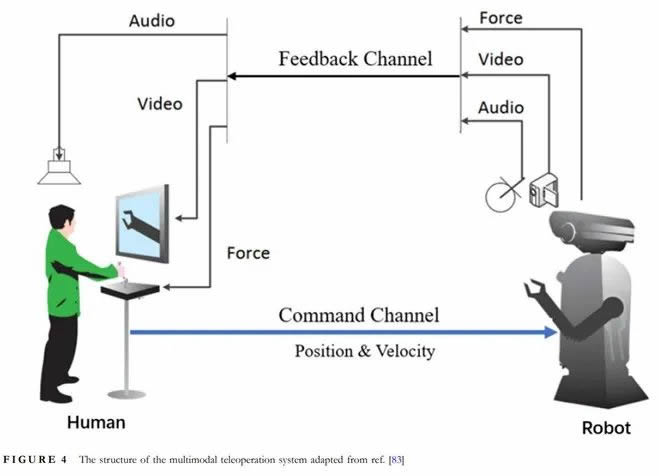
机器人操作技能获取的重要性,并强调了通过遥操作学习的优势。他们提出,遥操作学习可以帮助机器人更好地理解和模仿人类的操作技能,从而在各种复杂的环境和任务中表现出更G的适应性和灵活性。这种学习方式的核心是通过遥操作系统,让人类操作员直接控制机器人,或者通过机器学习算法从操作员的操作中学习任务的执行方式。 然后详细介绍了一种名为动态运动原语(DMPs)的框架,该框架可以实现运动规划和在线轨迹修改。DMPs初由Ijspeert等人提出,近也被用来编码不同的模态,如刚度和力度剖面。根据轨迹的类型,DMPs可以被分类为离散DMPs和节奏DMPs。这种方法的优势在于,它可以帮助机器人更好地理解和模仿人类的操作技能,从而在各种复杂的环境和任务中表现出更G的适应性和灵活性。 论文还讨论了遥操作学习的一些挑战,包括如何有效地收集多模态的示范,如何处理需要G比特率的多模态信号的传输问题,以及如何实现技能的泛化。作者们指出,由于工作环境的差异性和机器人需要执行的任务范围的无限性,教授机器人所有操作技能是不可能的。因此,当机器人在结构较少的环境中工作时,需要以平滑且快速的方式对各种干扰做出反应。
作者们总结了当前的研究趋势和未来的研究方向。当前的研究趋势主要包括多模态示教的获取和多模态信号的传输。未来的研究方向主要包括技能的泛化和多模态信息对学习性能的影响。 总的来说,提供了一个全面的视角来审视通过基于示教的遥操作来获取操作技能的问题,提出了一种新的方法论,并讨论了一些存在的挑战。这为进一步的研究和实践提供了有价值的参考。无论是对于机器人技术的研究者,还是对于希望了解这一L域的读者,这篇论文都提供了深入的见解和丰富的信息。通过阅读这篇论文,读者可以更好地理解遥操作学习的概念,了解其在机器人技能获取中的应用,以及面临的挑战和未来的可能性。
|
| 【声明:转载此文出于传递更多信息之目的,并不意味着赞同其观点或证实其描述,文章内容仅供参考,如有侵权,请联系删除。】 |
| 推荐信息 |
|
机器人从大型语言模型和视觉-语言模型中学习各种操作
给定环境的RGB-D观察和语言指令,LLM生成与VLM交互的代码,以生成一系列基于机器人观察空间的3D提供图和约束图,机器人可以根据视觉反馈提出多步骤操作策略
机器人Glow与机器人Character.AI对比
机器人Glow应用场景是情感陪伴,奇幻联想;机器人Character应用场景是情感陪伴、奇幻联想、头脑风暴、制定计划等
机器人Charater虚构人物类型丰富 供更接近真人的沟通体验
机器人Charater共有68类虚构人物标签,满足多元用户的多样话题交谈需求;可在对话中生成与识别图片,图像生成能力有进一步优化空间
C端消费者娱乐的AI聊天机器人Charater.AI
AI聊天机器人Charater自行创建具有特定个性,人设和知识储备的聊天机器人,具备更丰富的虚构人物,可识别和生成图片,支持语音输入 ,支持群聊等特色
MiniMax与OpenAI具有相似的商业模式规划,均发掘C端和B端变现场景
推出了C端聊天机器人Glow暂未开放收费;MiniMax从2023年起会逐步开放API,让更多的个人用户和企业用户基于多种模态的大模型构建自己的应用
机器人Glow核心为三大模态的基础模型架构User-in-the-Loop
Glow基于“User-in-the-Loop”进行产品输出结果的人为优化,模型将由此强化对用户对话喜好的认知,从而优化产品体验
聊天机器人Glow与其他社交APP(微信 ChatGPT)对比
,Glow或在一定程度上更好地解决用户情感陪伴以及奇幻情景联想的需求,从而增强用户的使用粘性;满足用户对虚构人物虚构场景的幻想
聊天机器人Glow提供情感陪伴体验,辅助虚构情景联想
Glow内智能体暂时无法反馈图片内容,用户可以与智能体就任何话题内容进行聊天,可以根据特定的话题,选择关联的智能体进行聊天 |
| 智能运输机器人 |
| AGV无人运输机器人-料箱版 |
| AGV无人运输机器人-标准版 |
| AGV无人运输机器人-料箱版(钣金材质) |
| AGV无人运输机器人-货架版(钣金材质) |
| AGV无人运输机器人-货架版(亮面不锈钢材质) |
| AGV无人运输机器人-开放版 |
| 行业动态 |
